LadderMill terms (not yet comprehensive)
- drag
- destabilizing
- tail fin
- point of attachment
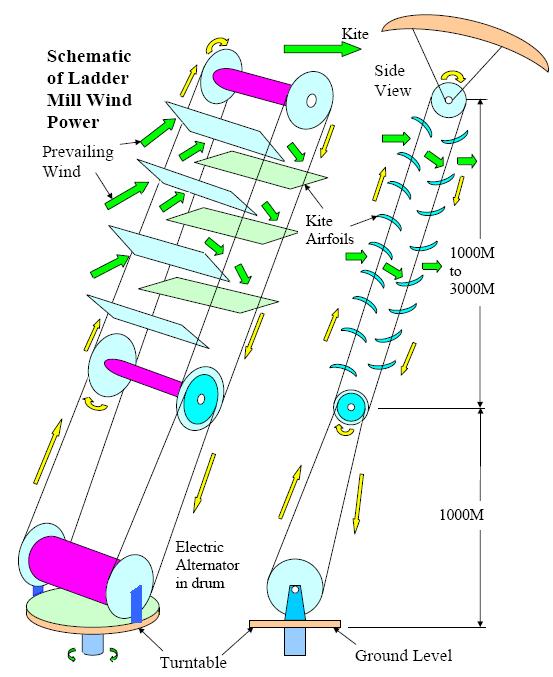
- laddermill
- pumping mill of single tether
- ratio of produced power to installed kite-system AWE power
- lifting bodies ....wings, balloons, kytoons, kites, flying sails, LTA
blimps,
- conventional windmills
- ASSET AeroSpace Sustainable Engineering and Technology of the Faculty
of Aerospace Engineering of Delft University of Technology
- Notice that on the first concept of the ASSET laddermill, the ascending
kites are vulnerable to the shadow of the descending kites; guiding the the
descending kites to the side would tend to reduce the shadow effect. I did not
see this matter discussed in an early article.
- gravity forces on parts of AWES
- AWES airborne wind energy system
- wind profile
- KiteLab had two sections: 1. Monitoring and preparation
- 2. Flight test section
- auxiliary launch towers
- safe altitude
- wind vane
- slack
- symmetric flight
- beach testing
- active control
- type of wing
- pitch control
- ailerons
- rudder
- elevator
- crosswind motions
- mass of tether
- tether mass
- ground station
- high L/D
- aerodynamic efficiency
- What is behind their statement: "Only at altitude the wing becomes less
stagle. At low altitude the longitutdinal motion of the wing approimates a
pitching rotation about the point of attachment of the wing to the main tether.
The horizontal stabilizer counters this rotation. As altitude increases, so
does the force the teher exerts onthe wing. This increase has a destabilizing
effect." WHAT IF each wing is set with its own kite line off a main
kite line???
- divergence
- escalating oscillation
- continuous divergence
- KitEye project (target: altitude record of single kite on single tether)
- Eperan-PP foam with glass- and carbon fiber reinforcements and has awing
span of 3 m, a wing surface of 0.75 m2 and a weight of 880 grams.
- unstable motions
- unstable reversed pendulum motion,
- slight dutch roll instability.
- pilot kite
- In the test kite: Furthermore, the use of carbon
fiber as a reinforcement material has been proven
unsatisfactory due to the fact that carbon-fiber
composite is quite brittle and will fail under
sudden shock loads.
- Later versions of this kite will be larger and will
consist of fabric and inflatable envelopes
providing sufficient rigidity. To predict the
behaviour of such a flexible structure, a theory is
being devised. This theory will be based on
fluid-structure interaction coupled with a
numerical approach to flight stability; much like
was done in the simulation program outlined in
section 4.
- control authority in yaw
- control authority in pitch
- inherently stable wings
- longitudinally stable
- course corrections
- yaw-control input
- Roll control is a degree of freedom which tethered wings do not have due to
the bridle lines attached to the wings.
- Article imprint creation date 11/4/2004 ...not sure of the month of 11 or
of 4
- advantages and disadvantages in each of the two methods
8. References
[1] Ockels, W.J., 2001, "Laddermill, a novel concept to exploit the energy in the airspace",
Aircraft design 4
(2001), pp 81-97.
[2] Royal Netherlands Meteorological Institute.
[3] EWEA, 2003, "Wind energy – The facts".
[4]
Dutch Ministry of economic affairs, 2001, "Bestuursovereenkomst
Landelijke Ontwikkeling Windenergie (Blow)", accessible at
http://apps.ez.nl/publicaties/pdfs/blow-bw1.pdf
, accessed 3-11-2004.
[5] Statistics Netherlands (Centraal Bureau voor de Statistiek), 2003, "Duurzame energie in Nederland",
http://www.cbs.nl/nl/publicaties/publicaties/bedri
jfsleven/energie-water/duurzame-energie-innederland-2003.pdf
, accessed
3-11-2004.
[6] Kan, J. van, 2000, Numerice wiskunde voor technici, Universiteitspers.
[7] Loyd, M.L., 1980, "Crosswind Kite Power",
Journal of Energy,
vol. 4, No. 3, pp 106-111.
[8] Bryant L.W., Brown W.S., Sweeting,
N.E., Collected researches on the stability of kites and towed gliders,
Aeronautical Research Council R&M 2303.
Keywords: AERODYNAMIC CONFIGURATIONS, HIGH SPEED, TETHERING,
TRANSVERSE OSCILLATION, WINDPOWER UTILIZATION, WINDPOWERED GENERATORS, C-5
AIRCRAFT, ENERGY TECHNOLOGY, EQUATIONS OF MOTION, NUMERICAL ANALYSIS
http://adsabs.harvard.edu/abs/1980JEner...4..106L
Misc. study notes:
Lake kite generator
Mobile kite generator
http://www.win.tue.nl/casa/meetings/special/ecmi08/pumping-kite.pdf
Mathematical Modeling of the Pumping Kite Wind Generator:
Optimization of the Power Output
October 31, 2008
Team Leader: Joachim Krenciszek
TU Kaiserslautern, Germany
Saheed Ojo Akindeinde
TU Kaiserslautern, Germany
Hans Braun
TU Kaiserslautern, Germany
Clement Marcel
University of Joseph Fourier, France
Eric Okyere
Eindhoven University of Technology, The Netherlands
Instructor: Dr. Ivan Argatov
Tampere University of Technology, Finland
===================================
constraints
laws
Prof. Diehl
References
[1] I. Argatov, P.
Rautakorpi, R. Silvennoinen, Estimation of
the mechanical energy output
of the kite wind generator, Submitted to
Renewable Energy.
[2] A. Bolonkin,
Utilization of Wind Energy at High Altitude, AIAA
Paper 2004-5705, Aug.
2004. P. 1{13.
[3] P. Williams,
Optimal wind power extraction with a tethered kite,
AIAA guidance, navi-
gation and control conference and exhibit. Keystone, Colorado,
21-24 (2006).
[4] M. Canale, L. Fagiano,
M. Ippolito, M. Milanese, Control of
tethered airfoils for a new
class of wind energy generator, 45th
IEEE Conference on Decision and Control
2006, San
Diego, USA, 2005. P. 4020{4026.
[5] M. Diehl,
1st International Workshop on Modelling and
Optimization of Power Generat-
ing Kites, KITE-OPT 07. Power Point Presentation, Optimization
in Engineering Center
(OPTEC), 2007.
[6] D. D. Lang,
Using kites to generate electricity: plodding, low
tech approach wins, Drachen
Foundation J. Issue 16 (2004) 14{15.
[7] B. Houska, M. Diehl
Optimal control of towing kites. In:
Proceedings of the 45th IEEE
Conference on Decision & Control, San Diego, USA, 13{15
December 2006.
[8]
B. Lansdorp, P.
Williams, The Laddermill Innovative Wind
Energy from High Altitudes in Holland and Australia, GLOBAL WINDPOWER 06 Conference,
Adelaide, Australia, 2006. P. 1{14}.
[9] M. L. Loyd,
Crosswind kite power, J. Energy,
4, (1980)
106{111.
[10] B. W. Roberts, D. H.
Shepard, K. Caldeira, M. E. Cannon, D. G. Eccles, A. J. Grenier,
J. F. Freidin, Harnessing
High-Altitude Wind Power, IEEE Transaction on Energy Con-version, 2007, 22, No. 1. P. 136{144.
[11] H. G. Carpenter,
Tethered Aircraft System for Gathering
Energy from Wind, US Patent
No. US 6,254,034, Jul. 2001.
[12] Chen, Wai-Fah,
Handbook of Structural Engineering. Boca Raton: CRC
Press, 1997.
[13] G. D. Ranger,
Axial-Mode Linear Wind-Turbine, US Patent No. US
6,523,781 B2, Feb. 2003.
[14] J. V. Mizzi,
Renewable Energy System Using Long-Stroke Open-Channel
Reciprocating Engines, US Patent No. US 6,555,931 B2, Apr. 2003.
- PS]
Kite Power Notes by David JC MacKay www.withouthotair.com December
...
The plane would work rather like a very large single-bladed. helicopter, but
without the helicopter. Bibliography.
Loyd, M. L. (1980).
Crosswind kite power. ...
www.inference.phy.cam.ac.uk/sustainable/book/tex/Kite.ps
-
Similar pages
|
{kind=link}
{kind=link}