| Messages in AirborneWindEnergy group. AWES 21347 to 21397 | Page 320 of 440. |
| Group: AirborneWindEnergy | Message: 21347 | From: joe_f_90032 | Date: 12/1/2016 |
| Subject: California Balloon Law | |||
| Group: AirborneWindEnergy | Message: 21348 | From: joe_f_90032 | Date: 12/1/2016 |
| Subject: Re: Google-Makani News | |||
| Group: AirborneWindEnergy | Message: 21349 | From: dave santos | Date: 12/1/2016 |
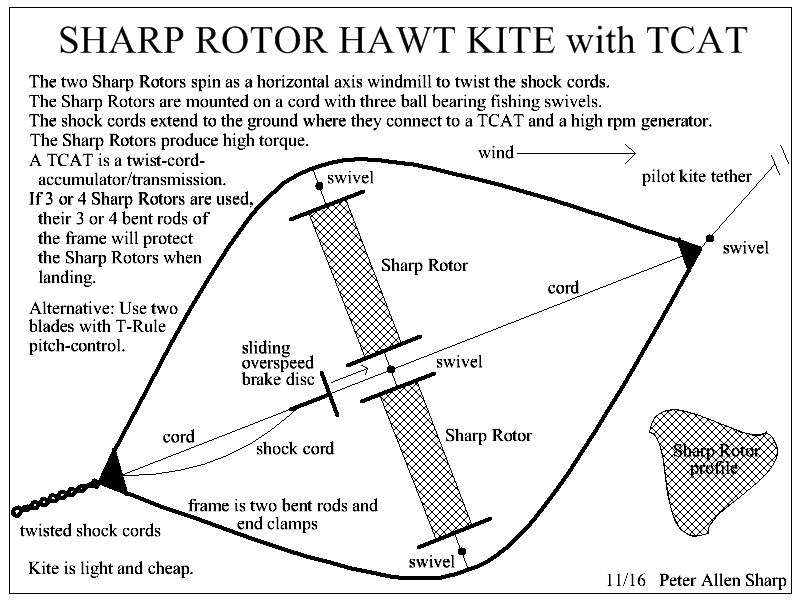
| Subject: Re: Sharp Rotor HAWT Kite with TCAT | |||
| Group: AirborneWindEnergy | Message: 21350 | From: joe_f_90032 | Date: 12/1/2016 |
| Subject: Re: Sharp Rotor HAWT Kite with TCAT | |||
| Group: AirborneWindEnergy | Message: 21351 | From: dave santos | Date: 12/1/2016 |
| Subject: A peek at Enerkite's new launching mast, and why more is not publicl | |||
| Group: AirborneWindEnergy | Message: 21352 | From: joe_f_90032 | Date: 12/1/2016 |
| Subject: Think reverse over Thomas A. Edison | |||
| Group: AirborneWindEnergy | Message: 21353 | From: joe_f_90032 | Date: 12/1/2016 |
| Subject: Hot Air Balloon Kite Surfing | |||
| Group: AirborneWindEnergy | Message: 21354 | From: joe_f_90032 | Date: 12/1/2016 |
| Subject: Kite Fishing Overview for Beginners | |||
| Group: AirborneWindEnergy | Message: 21355 | From: joe_f_90032 | Date: 12/1/2016 |
| Subject: How To Easily Attach Helium Balloon To Fishing Kite -ZTRAPON | |||
| Group: AirborneWindEnergy | Message: 21356 | From: Joe Faust | Date: 12/1/2016 |
| Subject: Fwd: [kitepatents] Hull | |||
| Group: AirborneWindEnergy | Message: 21357 | From: joe_f_90032 | Date: 12/1/2016 |
| Subject: Re: Forum headline images | |||
| Group: AirborneWindEnergy | Message: 21358 | From: joe_f_90032 | Date: 12/1/2016 |
| Subject: Re: Vestas Sailrocket 2 breaks world record in a big way | |||
| Group: AirborneWindEnergy | Message: 21359 | From: joe_f_90032 | Date: 12/1/2016 |
| Subject: Cyclogyro info collection gem | |||
| Group: AirborneWindEnergy | Message: 21360 | From: dave santos | Date: 12/1/2016 |
| Subject: Re: Sharp Rotor HAWT Kite with TCAT | |||
| Group: AirborneWindEnergy | Message: 21361 | From: dave santos | Date: 12/1/2016 |
| Subject: Re: Think reverse over Thomas A. Edison | |||
| Group: AirborneWindEnergy | Message: 21362 | From: dave santos | Date: 12/1/2016 |
| Subject: Re: Cyclogyro info collection gem | |||
| Group: AirborneWindEnergy | Message: 21363 | From: dave santos | Date: 12/1/2016 |
| Subject: Re: Fwd: [kitepatents] Hull | |||
| Group: AirborneWindEnergy | Message: 21364 | From: dave santos | Date: 12/2/2016 |
| Subject: WindLift a finalist at SXSW Eco Austin | |||
| Group: AirborneWindEnergy | Message: 21366 | From: dave santos | Date: 12/2/2016 |
| Subject: Re: hot air Balloons for energy kites-- a preliminary proposal | |||
| Group: AirborneWindEnergy | Message: 21367 | From: dave santos | Date: 12/2/2016 |
| Subject: Ampyx Offshore?? | |||
| Group: AirborneWindEnergy | Message: 21368 | From: dave santos | Date: 12/2/2016 |
| Subject: Dynamic Topologies in AWES Operations | |||
| Group: AirborneWindEnergy | Message: 21369 | From: dave santos | Date: 12/2/2016 |
| Subject: Wind Powered Thermal Ballooning | |||
| Group: AirborneWindEnergy | Message: 21370 | From: joe_f_90032 | Date: 12/2/2016 |
| Subject: University of Freiburg energy-kite systems AWE news | |||
| Group: AirborneWindEnergy | Message: 21371 | From: dave santos | Date: 12/3/2016 |
| Subject: UFreiburg's new kiteplane launch/land hardware | |||
| Group: AirborneWindEnergy | Message: 21372 | From: joe_f_90032 | Date: 12/3/2016 |
| Subject: Re: Google-Makani News | |||
| Group: AirborneWindEnergy | Message: 21373 | From: Peter A. Sharp | Date: 12/3/2016 |
| Subject: UFreiburg's new kiteplane launch/land hardware | |||
| Group: AirborneWindEnergy | Message: 21374 | From: dave santos | Date: 12/3/2016 |
| Subject: Re: UFreiburg's new kiteplane launch/land hardware | |||
| Group: AirborneWindEnergy | Message: 21375 | From: dave santos | Date: 12/3/2016 |
| Subject: Optimal Tether Elevation Angle for AWES (not too high) | |||
| Group: AirborneWindEnergy | Message: 21376 | From: dave santos | Date: 12/3/2016 |
| Subject: Delta-Wing Vortex-Lift (how the old NPW keeps up with the new Uniq) | |||
| Group: AirborneWindEnergy | Message: 21377 | From: joe_f_90032 | Date: 12/3/2016 |
| Subject: Re: Delta-Wing Vortex-Lift (how the old NPW keeps up with the new Un | |||
| Group: AirborneWindEnergy | Message: 21378 | From: dave santos | Date: 12/3/2016 |
| Subject: Re: Delta-Wing Vortex-Lift (how the old NPW keeps up with the new Un | |||
| Group: AirborneWindEnergy | Message: 21379 | From: benhaiemp | Date: 12/4/2016 |
| Subject: Re: UFreiburg's new kiteplane launch/land hardware | |||
| Group: AirborneWindEnergy | Message: 21380 | From: joe_f_90032 | Date: 12/4/2016 |
| Subject: Lorenzo Fagiano | |||
| Group: AirborneWindEnergy | Message: 21381 | From: dave santos | Date: 12/4/2016 |
| Subject: Kite Sport similarity-case handles a wide wind range and load demand | |||
| Group: AirborneWindEnergy | Message: 21382 | From: dave santos | Date: 12/4/2016 |
| Subject: Re: UFreiburg's new kiteplane launch/land hardware | |||
| Group: AirborneWindEnergy | Message: 21383 | From: dave santos | Date: 12/4/2016 |
| Subject: Re: Lorenzo Fagiano | |||
| Group: AirborneWindEnergy | Message: 21384 | From: Peter A. Sharp | Date: 12/4/2016 |
| Subject: Re: Increasing elevation angle | |||
| Group: AirborneWindEnergy | Message: 21385 | From: gordon_sp | Date: 12/4/2016 |
| Subject: Re: Fwd: Hello from Kitewinder located in france | |||
| Group: AirborneWindEnergy | Message: 21386 | From: dave santos | Date: 12/4/2016 |
| Subject: Re: Increasing elevation angle | |||
| Group: AirborneWindEnergy | Message: 21387 | From: dave santos | Date: 12/4/2016 |
| Subject: Re: Fwd: Hello from Kitewinder located in france | |||
| Group: AirborneWindEnergy | Message: 21388 | From: benhaiemp | Date: 12/5/2016 |
| Subject: Re: Fwd: Hello from Kitewinder located in france | |||
| Group: AirborneWindEnergy | Message: 21389 | From: joe_f_90032 | Date: 12/5/2016 |
| Subject: Re: Fwd: Hello from Kitewinder located in france | |||
| Group: AirborneWindEnergy | Message: 21390 | From: dave santos | Date: 12/5/2016 |
| Subject: Re: Fwd: Hello from Kitewinder located in france | |||
| Group: AirborneWindEnergy | Message: 21391 | From: dave santos | Date: 12/5/2016 |
| Subject: Re: Fwd: Hello from Kitewinder located in france | |||
| Group: AirborneWindEnergy | Message: 21392 | From: Pierre BENHAIEM | Date: 12/5/2016 |
| Subject: Re: Fwd: Hello from Kitewinder located in france | |||
| Group: AirborneWindEnergy | Message: 21393 | From: Pierre BENHAIEM | Date: 12/5/2016 |
| Subject: Re: Fwd: Hello from Kitewinder located in france | |||
| Group: AirborneWindEnergy | Message: 21394 | From: Pierre BENHAIEM | Date: 12/5/2016 |
| Subject: Re: Fwd: Hello from Kitewinder located in france | |||
| Group: AirborneWindEnergy | Message: 21395 | From: Pierre BENHAIEM | Date: 12/5/2016 |
| Subject: Re: Fwd: Hello from Kitewinder located in france | |||
| Group: AirborneWindEnergy | Message: 21396 | From: Pierre BENHAIEM | Date: 12/5/2016 |
| Subject: Re: Fwd: Hello from Kitewinder located in france | |||
| Group: AirborneWindEnergy | Message: 21397 | From: dave santos | Date: 12/5/2016 |
| Subject: Re: Fwd: Hello from Kitewinder located in france | |||
| Group: AirborneWindEnergy | Message: 21347 | From: joe_f_90032 | Date: 12/1/2016 |
| Subject: California Balloon Law | |||
|
|
| Group: AirborneWindEnergy | Message: 21348 | From: joe_f_90032 | Date: 12/1/2016 |
| Subject: Re: Google-Makani News | |||
|
| Group: AirborneWindEnergy | Message: 21349 | From: dave santos | Date: 12/1/2016 |
| Subject: Re: Sharp Rotor HAWT Kite with TCAT | |||
|
| Group: AirborneWindEnergy | Message: 21350 | From: joe_f_90032 | Date: 12/1/2016 |
| Subject: Re: Sharp Rotor HAWT Kite with TCAT | |||
|
|
| Group: AirborneWindEnergy | Message: 21351 | From: dave santos | Date: 12/1/2016 |
| Subject: A peek at Enerkite's new launching mast, and why more is not publicl | |||
|
| Group: AirborneWindEnergy | Message: 21352 | From: joe_f_90032 | Date: 12/1/2016 |
| Subject: Think reverse over Thomas A. Edison | |||
|
| Group: AirborneWindEnergy | Message: 21353 | From: joe_f_90032 | Date: 12/1/2016 |
| Subject: Hot Air Balloon Kite Surfing | |||
|
|
| Group: AirborneWindEnergy | Message: 21354 | From: joe_f_90032 | Date: 12/1/2016 |
| Subject: Kite Fishing Overview for Beginners | |||
|
|
| Group: AirborneWindEnergy | Message: 21355 | From: joe_f_90032 | Date: 12/1/2016 |
| Subject: How To Easily Attach Helium Balloon To Fishing Kite -ZTRAPON | |||
|
| Group: AirborneWindEnergy | Message: 21356 | From: Joe Faust | Date: 12/1/2016 |
| Subject: Fwd: [kitepatents] Hull | |||
|
|||||||||||||||||||||||
| Group: AirborneWindEnergy | Message: 21357 | From: joe_f_90032 | Date: 12/1/2016 |
| Subject: Re: Forum headline images | |||
|
|
| Group: AirborneWindEnergy | Message: 21358 | From: joe_f_90032 | Date: 12/1/2016 |
| Subject: Re: Vestas Sailrocket 2 breaks world record in a big way | |||
|
| Group: AirborneWindEnergy | Message: 21359 | From: joe_f_90032 | Date: 12/1/2016 |
| Subject: Cyclogyro info collection gem | |||
|
|
| Group: AirborneWindEnergy | Message: 21360 | From: dave santos | Date: 12/1/2016 |
| Subject: Re: Sharp Rotor HAWT Kite with TCAT | |||
|
| Group: AirborneWindEnergy | Message: 21361 | From: dave santos | Date: 12/1/2016 |
| Subject: Re: Think reverse over Thomas A. Edison | |||
|
| Group: AirborneWindEnergy | Message: 21362 | From: dave santos | Date: 12/1/2016 |
| Subject: Re: Cyclogyro info collection gem | |||
|
| Group: AirborneWindEnergy | Message: 21363 | From: dave santos | Date: 12/1/2016 |
| Subject: Re: Fwd: [kitepatents] Hull | |||
|
|||||||||||||||||||||||
| Group: AirborneWindEnergy | Message: 21364 | From: dave santos | Date: 12/2/2016 |
| Subject: WindLift a finalist at SXSW Eco Austin | |||
| Group: AirborneWindEnergy | Message: 21366 | From: dave santos | Date: 12/2/2016 |
| Subject: Re: hot air Balloons for energy kites-- a preliminary proposal | |||
|
| Group: AirborneWindEnergy | Message: 21367 | From: dave santos | Date: 12/2/2016 |
| Subject: Ampyx Offshore?? | |||
|
| Group: AirborneWindEnergy | Message: 21368 | From: dave santos | Date: 12/2/2016 |
| Subject: Dynamic Topologies in AWES Operations | |||
|
| Group: AirborneWindEnergy | Message: 21369 | From: dave santos | Date: 12/2/2016 |
| Subject: Wind Powered Thermal Ballooning | |||
|
| Group: AirborneWindEnergy | Message: 21370 | From: joe_f_90032 | Date: 12/2/2016 |
| Subject: University of Freiburg energy-kite systems AWE news | |||
|
|
| Group: AirborneWindEnergy | Message: 21371 | From: dave santos | Date: 12/3/2016 |
| Subject: UFreiburg's new kiteplane launch/land hardware | |||
|
| Group: AirborneWindEnergy | Message: 21372 | From: joe_f_90032 | Date: 12/3/2016 |
| Subject: Re: Google-Makani News | |||
|
| Group: AirborneWindEnergy | Message: 21373 | From: Peter A. Sharp | Date: 12/3/2016 |
| Subject: UFreiburg's new kiteplane launch/land hardware | |||
|
| Group: AirborneWindEnergy | Message: 21374 | From: dave santos | Date: 12/3/2016 |
| Subject: Re: UFreiburg's new kiteplane launch/land hardware | |||
|
| Group: AirborneWindEnergy | Message: 21375 | From: dave santos | Date: 12/3/2016 |
| Subject: Optimal Tether Elevation Angle for AWES (not too high) | |||
|
| Group: AirborneWindEnergy | Message: 21376 | From: dave santos | Date: 12/3/2016 |
| Subject: Delta-Wing Vortex-Lift (how the old NPW keeps up with the new Uniq) | |||
|
| Group: AirborneWindEnergy | Message: 21377 | From: joe_f_90032 | Date: 12/3/2016 |
| Subject: Re: Delta-Wing Vortex-Lift (how the old NPW keeps up with the new Un | |||
|
|
| Group: AirborneWindEnergy | Message: 21378 | From: dave santos | Date: 12/3/2016 |
| Subject: Re: Delta-Wing Vortex-Lift (how the old NPW keeps up with the new Un | |||
|
| Group: AirborneWindEnergy | Message: 21379 | From: benhaiemp | Date: 12/4/2016 |
| Subject: Re: UFreiburg's new kiteplane launch/land hardware | |||
|
|
| Group: AirborneWindEnergy | Message: 21380 | From: joe_f_90032 | Date: 12/4/2016 |
| Subject: Lorenzo Fagiano | |||
|
| Group: AirborneWindEnergy | Message: 21381 | From: dave santos | Date: 12/4/2016 |
| Subject: Kite Sport similarity-case handles a wide wind range and load demand | |||
|
| Group: AirborneWindEnergy | Message: 21382 | From: dave santos | Date: 12/4/2016 |
| Subject: Re: UFreiburg's new kiteplane launch/land hardware | |||
|
| Group: AirborneWindEnergy | Message: 21383 | From: dave santos | Date: 12/4/2016 |
| Subject: Re: Lorenzo Fagiano | |||
|
| Group: AirborneWindEnergy | Message: 21384 | From: Peter A. Sharp | Date: 12/4/2016 |
| Subject: Re: Increasing elevation angle | |||
|
| Group: AirborneWindEnergy | Message: 21385 | From: gordon_sp | Date: 12/4/2016 |
| Subject: Re: Fwd: Hello from Kitewinder located in france | |||
|
| Group: AirborneWindEnergy | Message: 21386 | From: dave santos | Date: 12/4/2016 |
| Subject: Re: Increasing elevation angle | |||
|
| Group: AirborneWindEnergy | Message: 21387 | From: dave santos | Date: 12/4/2016 |
| Subject: Re: Fwd: Hello from Kitewinder located in france | |||
|
| Group: AirborneWindEnergy | Message: 21388 | From: benhaiemp | Date: 12/5/2016 |
| Subject: Re: Fwd: Hello from Kitewinder located in france | |||
|
| Group: AirborneWindEnergy | Message: 21389 | From: joe_f_90032 | Date: 12/5/2016 |
| Subject: Re: Fwd: Hello from Kitewinder located in france | |||
|
| Group: AirborneWindEnergy | Message: 21390 | From: dave santos | Date: 12/5/2016 |
| Subject: Re: Fwd: Hello from Kitewinder located in france | |||
|
| Group: AirborneWindEnergy | Message: 21391 | From: dave santos | Date: 12/5/2016 |
| Subject: Re: Fwd: Hello from Kitewinder located in france | |||
|
| Group: AirborneWindEnergy | Message: 21392 | From: Pierre BENHAIEM | Date: 12/5/2016 |
| Subject: Re: Fwd: Hello from Kitewinder located in france | |||
|
| Group: AirborneWindEnergy | Message: 21393 | From: Pierre BENHAIEM | Date: 12/5/2016 |
| Subject: Re: Fwd: Hello from Kitewinder located in france | |||
|
| Group: AirborneWindEnergy | Message: 21394 | From: Pierre BENHAIEM | Date: 12/5/2016 |
| Subject: Re: Fwd: Hello from Kitewinder located in france | |||
|
| Group: AirborneWindEnergy | Message: 21395 | From: Pierre BENHAIEM | Date: 12/5/2016 |
| Subject: Re: Fwd: Hello from Kitewinder located in france | |||
|
| Group: AirborneWindEnergy | Message: 21396 | From: Pierre BENHAIEM | Date: 12/5/2016 |
| Subject: Re: Fwd: Hello from Kitewinder located in france | |||
|
| Group: AirborneWindEnergy | Message: 21397 | From: dave santos | Date: 12/5/2016 |
| Subject: Re: Fwd: Hello from Kitewinder located in france | |||
|